Mira Multimodal Intelligent Robotic Assistant
What is Mira Multimodal Intelligent Robotic Assistant
MIRA-Multimodal-Intelligent-Robotic-Assistant is an intelligent robotic assistant based on the Qwen Agent framework, integrating JAKA robotic arms, visual detection, speech recognition and synthesis, and the MCP database into a multimodal large model.
Use cases
Use cases include assisting in robotic arm operations, providing information through voice and text responses, and performing tasks like querying local databases or understanding images.
How to use
To use MIRA, set up the Gradio web interface to allow voice, text, and image inputs. Users can interact with MIRA through this interface, which processes input using the Qwen LLM and executes corresponding actions. Ensure to calibrate the robotic arm before using it for object manipulation.
Key features
Key features include multimodal interaction via Gradio, LLM understanding commands, rich feedback from peripherals (like speakers), and the use of the Qwen Agent framework for efficient function calling.
Where to use
MIRA can be utilized in various fields such as robotics, education, customer service, and any domain requiring interactive AI assistance.
Clients Supporting MCP
The following are the main client software that supports the Model Context Protocol. Click the link to visit the official website for more information.





Overview
What is Mira Multimodal Intelligent Robotic Assistant
MIRA-Multimodal-Intelligent-Robotic-Assistant is an intelligent robotic assistant based on the Qwen Agent framework, integrating JAKA robotic arms, visual detection, speech recognition and synthesis, and the MCP database into a multimodal large model.
Use cases
Use cases include assisting in robotic arm operations, providing information through voice and text responses, and performing tasks like querying local databases or understanding images.
How to use
To use MIRA, set up the Gradio web interface to allow voice, text, and image inputs. Users can interact with MIRA through this interface, which processes input using the Qwen LLM and executes corresponding actions. Ensure to calibrate the robotic arm before using it for object manipulation.
Key features
Key features include multimodal interaction via Gradio, LLM understanding commands, rich feedback from peripherals (like speakers), and the use of the Qwen Agent framework for efficient function calling.
Where to use
MIRA can be utilized in various fields such as robotics, education, customer service, and any domain requiring interactive AI assistance.
Clients Supporting MCP
The following are the main client software that supports the Model Context Protocol. Click the link to visit the official website for more information.
Content
MIRA: 基于多模态LLM的智能辅助机械臂助手
项目介绍
本项目是我在人工智能交互技术AI1101课程上的大作业,我投入了约20小时完成,主要功能如下:
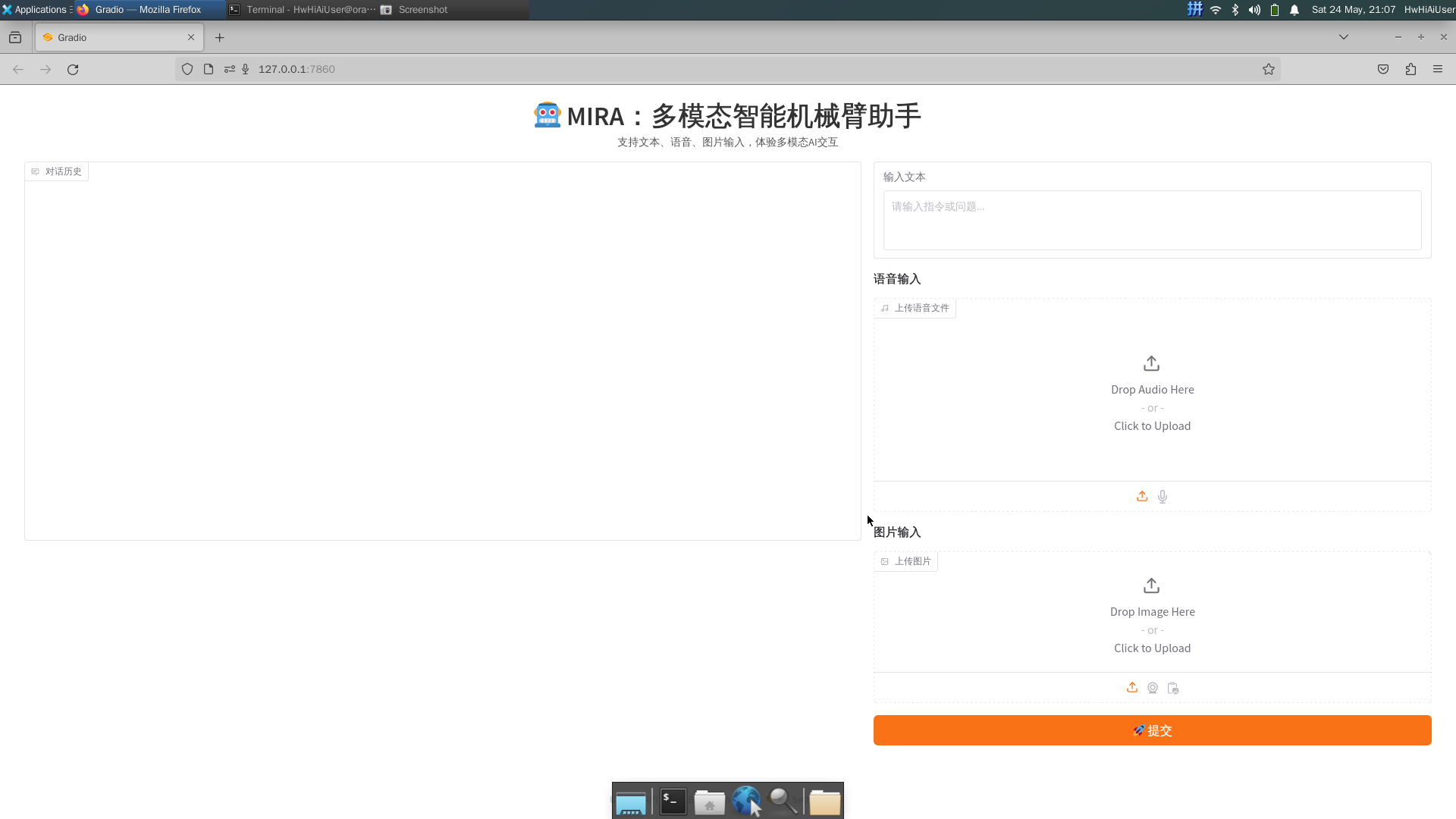
- 多模态交互:利用Gradio搭建的网页界面,可以用语音、文字和图片提问,MIRA用文字和语音回答,并对于涉及机械臂操作的问题给出正确响应,支持多轮对话和上下文记忆
- LLM理解指令:将多模态输入初步处理,由Qwen LLM(qwen-plus)进行理解并自行调用对应工具类,实现查询时间、天气、位置、操作本地SQLite数据库、操作机械臂、调用QwenVL 模型进行图像理解等
- 丰富外设反馈:在通过网页文字回复的同时,利用音箱提供语音输出,并通过串口与micro:bit通信以提供视觉和声音效果
- Qwen Agent框架:使用Qwen Agent框架编写Function Calling和MCP,避免了冗长复杂的Prompt编写和不确定性,提高正确调用对应工具的概率
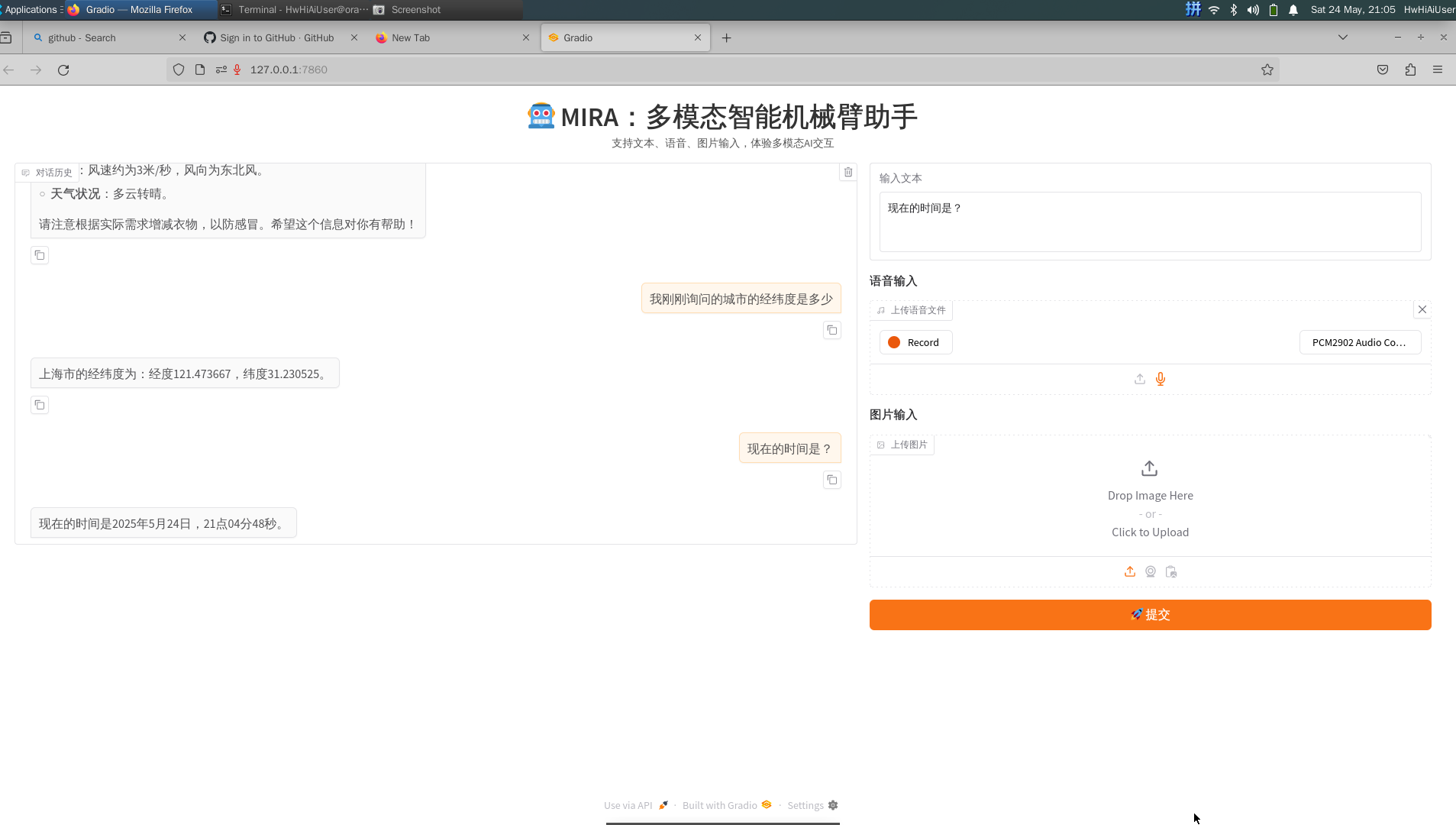
使用举例
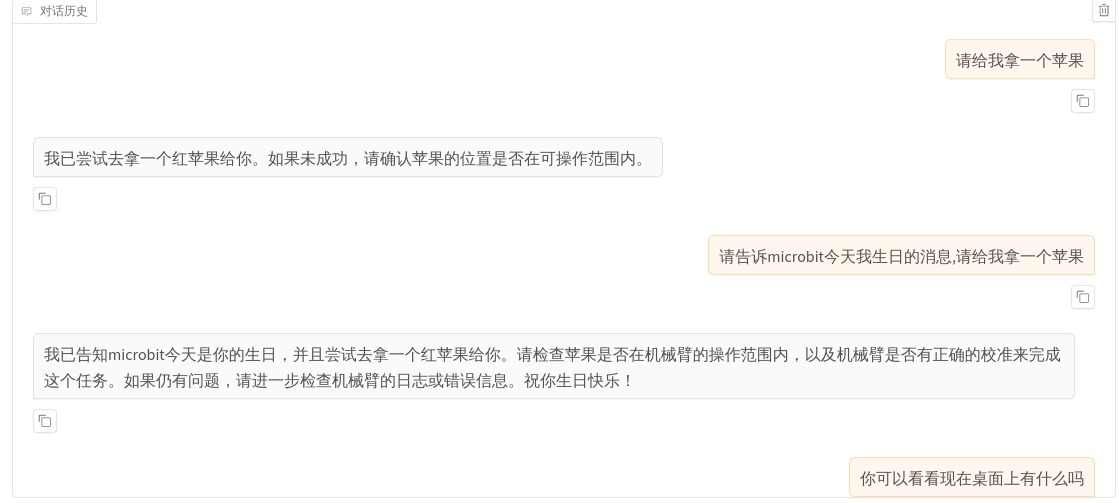
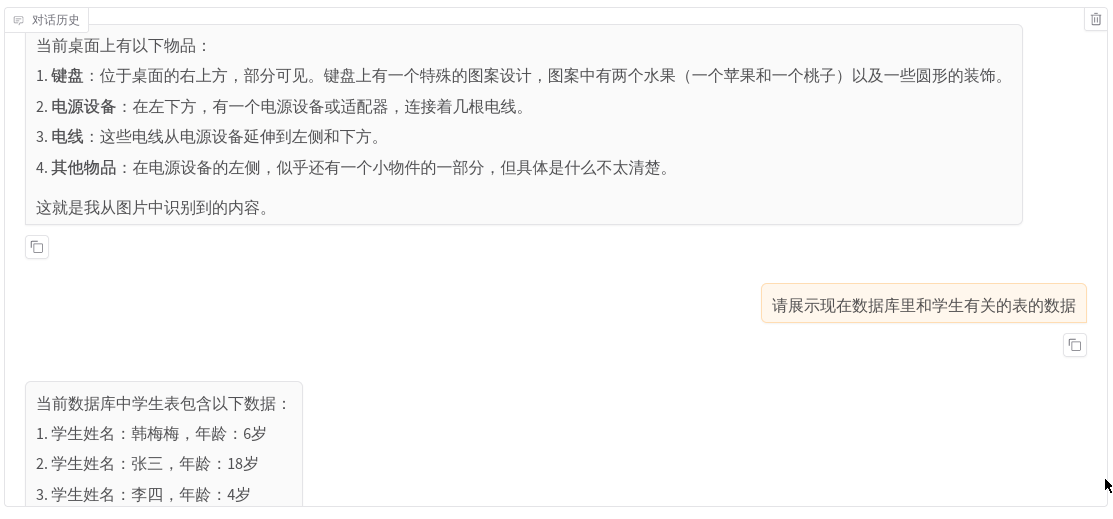
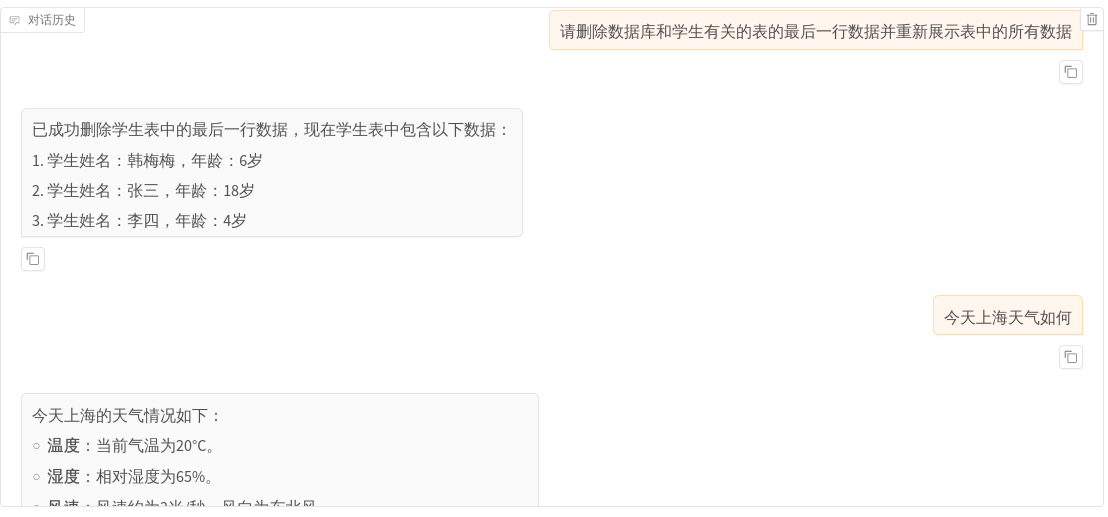
如下图片展示了用户语音和文本输入时,MIRA的回复,更加详细的演示过程可以参考:example_show/演示视频.mp4
环境准备
硬件环境:香橙派AIPro20T(Ubuntu 22.04),声卡,音箱,麦克风,相机,JAKA机械臂,microbit v2
软件配置:使用miniconda创建环境,并安装依赖包
- 克隆仓库
git clone https://github.com/johnnyhank/MIRA-Multimodal-Intelligent-Robotic-Assistant.git
- 安装系统依赖
sudo apt update sudo xargs apt install -y < system_packages.txt
- 创建虚拟环境
conda create -n mira python=3.10.9
- 激活环境
conda activate mira
- 安装依赖包
pip install -r requirements.txt
注意:如果环境有问题,请参考其余目录说明中的两份参考文档进行配置
使用方式
注意,如果要调用机械臂吸取相关程序,请先按照模块简介中有关标定程序的步骤进行标定,否则机械臂可能无法正确吸取物体。
基于Function calling集成的Qwen Agent
- 使用搭建的gradio页面(支持语音和图像输入)
cd 05-samrt-robot python webui_qwen.py
- 使用Qwen Agent提供的WebUI
cd 05-samrt-robot python utils_qwen_agent.py
基于Prompt的Json生成方式调用外部函数的LLM Agent
cd 05-samrt-robot python gradio_app.py
模块简介
05-samrt-robot: 基于多模态LLM的智能辅助机械臂助手
- API_Key_utils.py:保存所有的API Key
- calib_bd1127.py:计算仿射变换矩阵
- calib_cam_point.py:获取相机标定点的坐标
- calib_grip_test.py:测试机械臂吸取功能
- calib_robot_point.py:获取机械臂标定点的坐标
- gradio_app.py:提供基于Prompt的Json生成方式调用外部函数的LLM Agent的WebUI
- start.py:提供基于Prompt的Json生成方式调用外部函数的LLM Agent的命令行运行
- utils_agent.py:定义智能体 Agent 的编排逻辑,根据Prompt生成 JSON 格式的动作列表,并提供示例模板。
- utils_cam.py:提供相机相关功能,如打开摄像头实时预览、拍照并保存图像。
- utils_llm.py:提供大语言模型(LLM)相关功能,包括时间、天气查询以及与高德地图的接口。
- utils_micro_bit.py:提供与 micro:bit 设备通信的功能,包括连接设备、发送数据和断开连接。
- utils_onnx_yolo.py:实现基于 ONNX 模型的目标检测功能,用于识别图像中的物体并返回其中心点坐标。
- utils_qwen_agent.py:使用Qwen Agent框架开发agent,定义多个自定义工具类,实现与机械臂、micro:bit 和视觉模型的交互。
- utils_robot.py:提供机械臂的基本操作函数,如初始化、移动到指定位置和执行问候动作。
- utils_spe_rec.py:提供语音识别功能,包括录音和使用百度语音识别 API 将音频转换为文本。
- utils_tts.py:提供文本转语音功能,使用 Edge TTS 合成语音并播放。
- utils_vlm.py:提供视觉语言模型(VLM)相关的功能,使用通义千问 VL 模型进行图像识别。
- utils_vlm_move.py:结合视觉识别和机械臂控制,实现根据图像识别结果抓取特定物体的功能。
- webui_qwen.py:基于 Gradio 的 Web 用户界面,支持多模态输入(文本、语音、图片),并与 Qwen Agent 集成,提供更直观的交互体验。
标定程序
由于相机的位置不一定固定,因此需要进行标定(本仓库代码使用的是九点标定),大致流程和涉及到的Python脚本如下:
- 获取九点在相机坐标系下的坐标
在弹出的窗口中,将标定点按顺序点击,并记录九点在相机坐标系下的坐标。python 05-samrt-robot/calib_cam_point.py - 获取九点机械臂坐标系下的坐标
按住FREE将机械臂依次移动到九点对应位置,再按POINT键,记录九点在机械臂坐标系下的坐标。(注意相机坐标系和机械臂坐标系中九点的顺序需要一一对应)python 05-samrt-robot/calib_robot_point.py - 计算仿射变换矩阵
记录打印的仿射变换矩阵,并将utils_vlm_move.py中的relation_matrix替换为计算得到的仿射变换矩阵。python 05-samrt-robot/calib_bd1127.py
其余目录说明
本项目是在https://gitee.com/myronx/OrangePi-SIC 的基础上改进的,其余模块基本未作修改
-
00-starter-pack: 配置模块,香橙派启动自动播报IP地址
-
01-voice-interaction:语音交互模块,语音识别与语音合成
-
02-erniebot:基于Ernie Bot的大语言模块
-
03-yolo-om-infer:视觉模块,YOLO检测模型
-
04-jaka-minicobo:机械臂模块,操纵节卡机械臂
- 04.get_tcppos.py 可以用于获取吸取的物体的对应坐标
香橙派参考文档请见:https://notes.sjtu.edu.cn/s/iL4X6eLvz
节卡单臂机器人操作手册:https://notes.sjtu.edu.cn/s/qtKNPFdBT
致谢与感悟
在本项目开发过程中,我衷心感谢以下个人和团队的支持与帮助(不分先后):
感谢 AI1101的教师楚朋志、谢铭烨 的悉心指导与宝贵建议。
感谢 AI1101课程的所有材料、https://gitee.com/myronx/OrangePi-SIC 与开源社区提供的相关工具和框架,为本项目提供了坚实的技术支持。
感谢 提供相关API的平台:
百度AIP(https://cloud.baidu.com/)
文心一言(https://aistudio.baidu.com/overview)
通义千问(https://help.aliyun.com/zh/model-studio/first-api-call-to-qwen)
心知天气(https://www.seniverse.com/)
高德地图(https://lbs.amap.com/dev/id/newuser)
此外,在项目的开发过程中,我也收获了许多宝贵的经验与思考:
- 多模态交互的设计需要兼顾用户体验和技术实现。
- 机械臂控制与视觉识别的结合对精度要求较高,需要进行坐标系的转换,而标定过程是关键环节之一。
- Qwen Agent框架的的搭建与使用,使得所有的工具都以同样的方式可以被使用。事实上,我一开始使用的是https://gitee.com/myronx/OrangePi-SIC 中通过Prompt调用函数的方法,但是这种Prompt生成Json再解析函数的调用方式比较繁琐且容易出现错误,因此,我决定使用Qwen Agent框架进行重构,使得所有的工具都以同样的方式可以被使用。
未来,希望 MIRA 能够不断完善,为更多场景提供智能化服务!
Dev Tools Supporting MCP
The following are the main code editors that support the Model Context Protocol. Click the link to visit the official website for more information.










