Mcp Ros2
What is Mcp Ros2
mcp_ros2 is a project designed to enable Large Language Models (LLMs) to control ROS2 robots using the MCP framework.
Use cases
Use cases include automated robotic manipulation tasks, remote control of robots for exploration, and educational purposes in teaching robotics and AI integration.
How to use
To use mcp_ros2, configure the ‘mcp_cline_settings.json’ file with your project directory and environment settings, then run the ‘mcp_server.py’ script using the command specified in the configuration.
Key features
Key features include tools for locating objects within the robot’s workspace, moving tools to desired positions, and saving images captured by the robot.
Where to use
mcp_ros2 can be used in robotics research, automation, and any application that requires interaction between LLMs and robotic systems.
Clients Supporting MCP
The following are the main client software that supports the Model Context Protocol. Click the link to visit the official website for more information.





Overview
What is Mcp Ros2
mcp_ros2 is a project designed to enable Large Language Models (LLMs) to control ROS2 robots using the MCP framework.
Use cases
Use cases include automated robotic manipulation tasks, remote control of robots for exploration, and educational purposes in teaching robotics and AI integration.
How to use
To use mcp_ros2, configure the ‘mcp_cline_settings.json’ file with your project directory and environment settings, then run the ‘mcp_server.py’ script using the command specified in the configuration.
Key features
Key features include tools for locating objects within the robot’s workspace, moving tools to desired positions, and saving images captured by the robot.
Where to use
mcp_ros2 can be used in robotics research, automation, and any application that requires interaction between LLMs and robotic systems.
Clients Supporting MCP
The following are the main client software that supports the Model Context Protocol. Click the link to visit the official website for more information.
Content
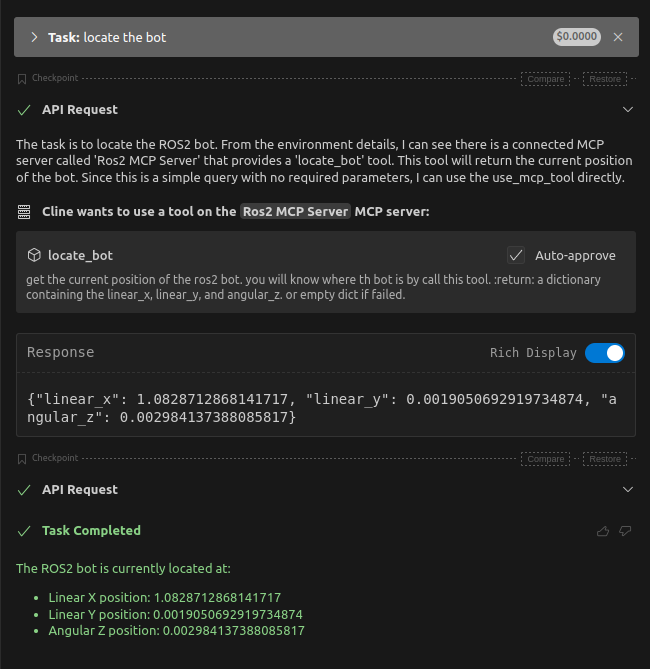
This project is used to let LLM control the ros2 robot by using MCP
like this:
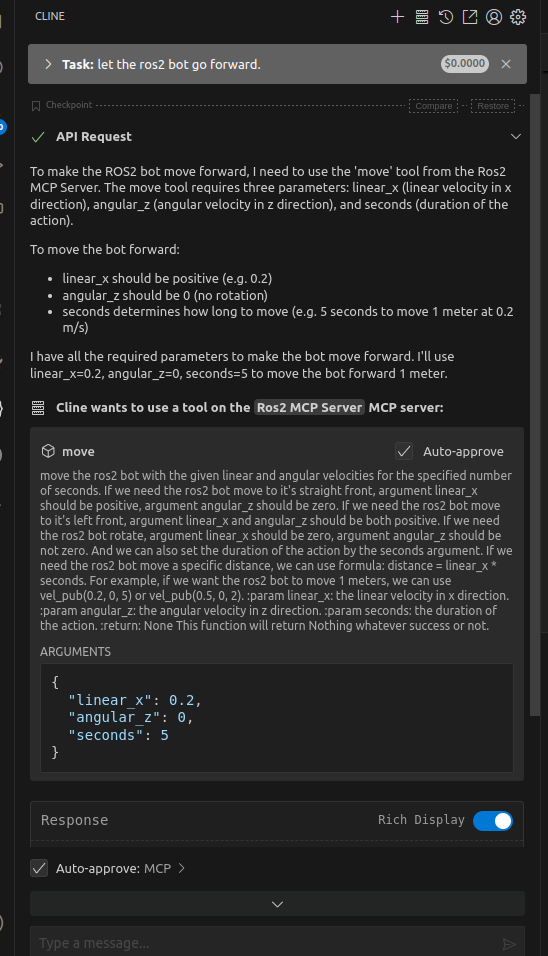
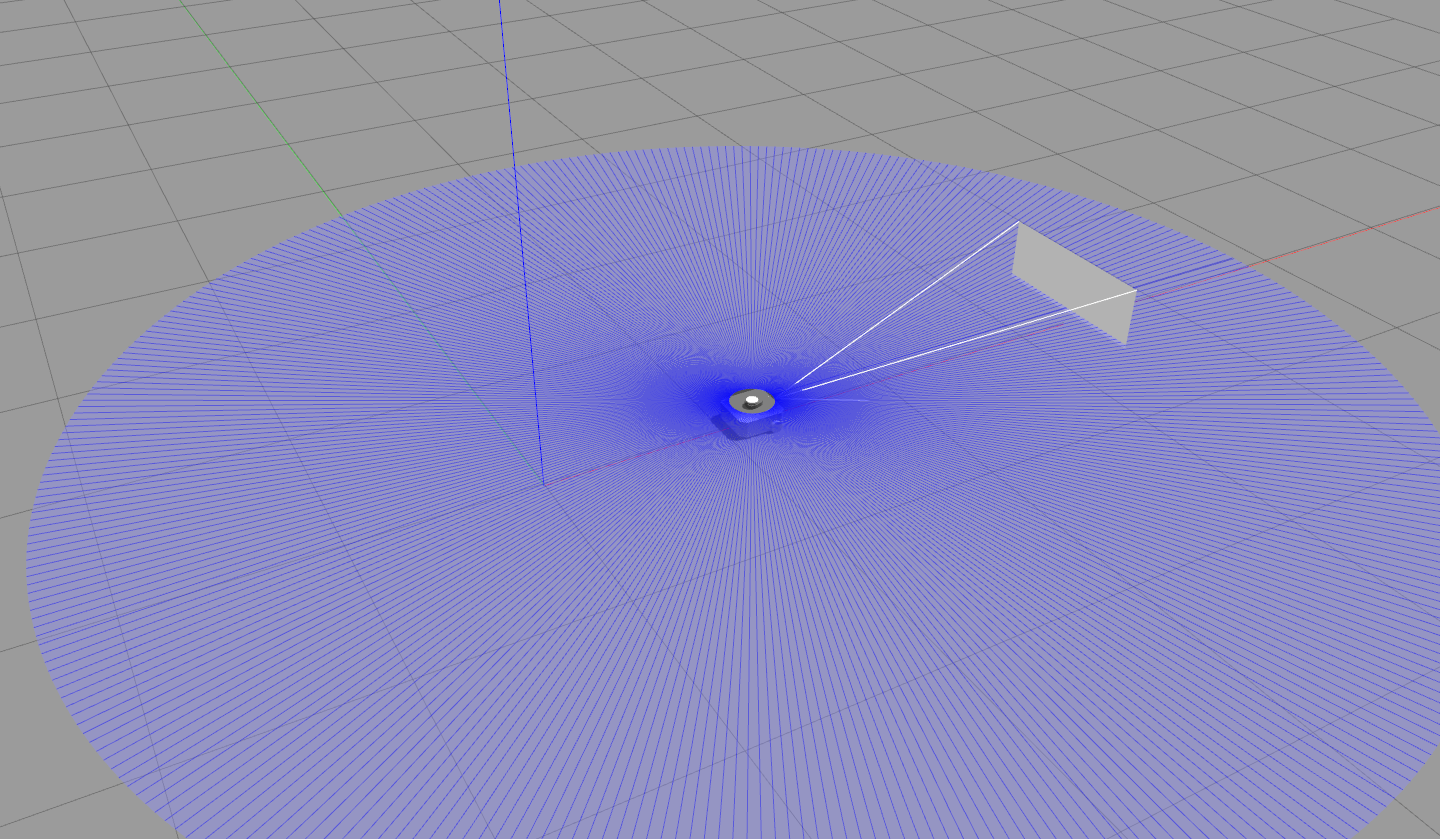
After using the move tool, the robot will leave the original position (the coordinate orgin). like this:
I provide only 3 tools for now:
- locate: locate the tool in the robot’s workspace
- move: move the tool to the desired position
- save_image: save the image captured by bot to specified directory
more details is in the comment of mcp_server.py
I will add more tools in the future.
b.t.w, if U use cline, U should configure mcp_cline_settings.json like this:
the env value should be set according to your system.
the detailed usage I will upload on bilibili in the future.
Dev Tools Supporting MCP
The following are the main code editors that support the Model Context Protocol. Click the link to visit the official website for more information.










